Перевёл alexlevchenko для mozgochiny.ru
Всем привет. Эта статья небольшой рассказ о том, как сделать робота своими руками.
Почему именно рассказ, спросите вы? Всё из-за того, что для изготовления подобной поделки необходимо использовать значительный багаж знаний, который очень трудно изложить в одной статье.
Мы пройдёмся по процессу сборки, заглянем одним глазом в программный код и в конечном счете оживим детище «силиконовой долины». Советую посмотреть видео, чтобы иметь представление о том, что в итоге должно получится.
Перед тем, как двигаться дальше прошу отметить следующее, что при изготовлении поделки использовался лазерный резак. От лазерного резака можно отказаться, обладая достаточным опытом работы руками. Точность выступает тем ключом, что поможет завершить проект успешно!

Шаг 1: Как это работает?
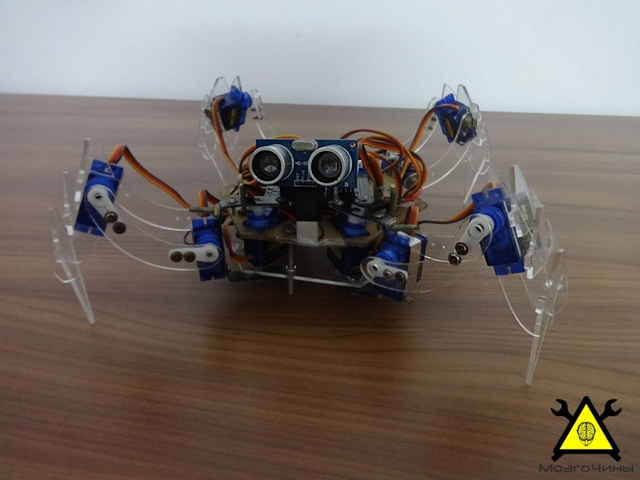
Робот имеет 4 ноги, с 3 сервоприводами на каждой из них, что позволяют ему перемещать конечности в 3-х степенях свободы. Он передвигается «ползучей походкой». Пусть она медленная, зато одна из самых плавных.
Для начала нужно научить робота двигаться вперед, назад, влево и вправо, затем добавить ультразвуковой датчик, что поможет обнаруживать препятствия/преграды, а после этого Bluetooth модуль, благодаря которому управление роботом выйдет на новый уровень.
Шаг 2: Необходимые детали

Скелет изготавливается из оргстекла толщиной 2 мм.
Электронная часть самоделки будет состоять из:
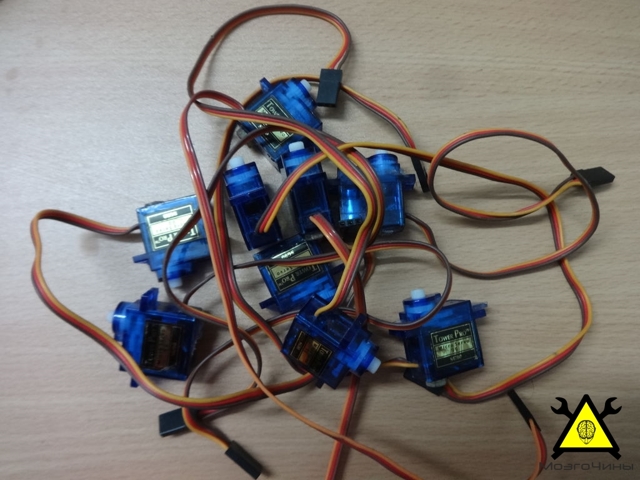
- 12 сервоприводов;
- arduino nano (можно заменить любой другой платой arduino);

- Шилда для управления сервоприводами;
- блока питания (в проекте использовался БП 5В 4А);

- ультразвукового датчика;
- hc 05 bluetooth модуля;
Для того, чтобы изготовить шилд понадобится:

- монтажная плата (предпочтительно с общими линиями (шинами) питания и земли);
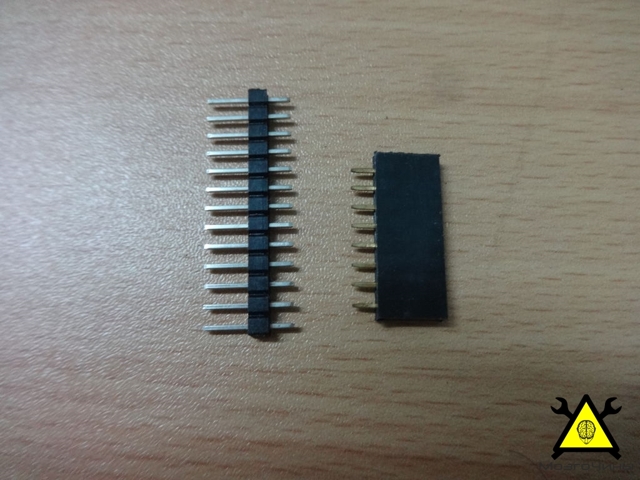
- межплатные штыревые соединители — 30 шт;
- гнезда на плату – 36 шт;
Инструменты:
- Лазерный резак (или умелые руки);
- Суперклей;
- Термоклей.
Шаг 3: Скелет

Воспользуемся графической программой, чтобы начертить составные части скелета.
После этого в любой доступный способ вырезаем 30 деталей будущего робота.
hexy_legs_all
Шаг 4: Сборка
- После резки снимаем защитное бумажное покрытие с оргстекла.
Далее приступаем к сборке ног. Крепежные элементы встроенные в части скелета. Всё, что остаётся сделать — это соединить детали воедино. Соединение довольно плотное, но для большей надежности можно нанести по капле суперклея на элементы крепежа.
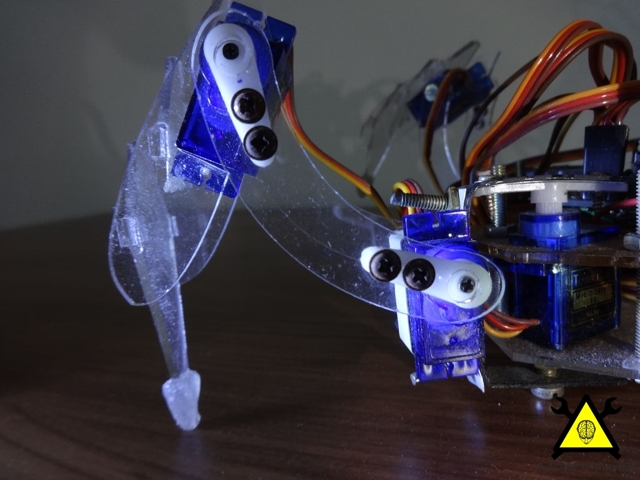
- Затем нужно доработать сервоприводы (приклеить по винту напротив валов сервоприводов).
Этой доработкой мы сделаем робота более устойчивым. Доработку нужно выполнить только для 8 сервоприводов, остальные 4 будут крепиться непосредственно на тело.
Прикрепляем ноги к связующему элементу (изогнутая деталь), а его в свою очередь к сервоприводу на теле.
Шаг 5: Изготавливаем шилд
- Изготовление платы довольно простое, если следовать представленным в шаге фотографиям.
Шаг 6: Электроника
Закрепим выводы сервоприводов на плате arduino. Выводы следует соединять в правильной последовательности, иначе ничего не будет работать!
Шаг 7: Программирование
Пришло время оживить Франкенштейна. Сначала загрузим программу legs_init и убедимся в том, что робот находится в таком положении, как на картинке. Далее загрузим quattro_test, чтобы проверить реагирует ли робот на базовые движения, такие как движение вперед, назад, влево и вправо.
- ВАЖНО: Вам необходимо добавить дополнительную библиотеку в программную среду arduino IDE. Ссылка на библиотеку представлена ниже:
flexitimer2-master
Робот должен сделать 5 шагов вперед, 5 шагов назад, повернутся влево на 90 градусов, повернутся вправо на 90 градусов. Если Франкенштейн делает всё правильно, мы двигаемся в верном направлении.
P.S: установите робота на чашку, как на стенд, чтобы каждый раз не выставлять его на первоначальную точку. Как только тесты показали нормальную работу робота, можем продолжать испытания, поставив его на землю/пол.
init_and_test
Шаг 8: Инверсная кинематика
- Инверсная (обратная) кинематика – именно она в действительности и управляет роботом (если вам не интересна математическая сторона этого проекта и вы торопитесь закончить проект можете пропустить данный шаг, но знание того, что движет роботом всегда будут полезны).
Простыми словами инверсная кинематика или сокращенно ик – «часть» тригонометрических уравнений, что определяют положение острого конца ноги, угла каждого сервоприводи и т.д., что в итоге определяют пару предварительных установочных параметров.
Для примера, длина каждого шага робота или высота на которой будет располагаться тело во время движения/покоя.
Используя эти предопределенные параметры, система будет извлекать величину, на которую следует сдвинуть каждый сервопривод, для того чтобы управлять роботом при помощи задаваемых команд.
- На фотографии показаны тригонометрические уравнения, которые в последствии трансформировались в математическую часть программы.
- Код прикрепленный ниже – всего лишь недоработанные формулы, с которыми вы можете «повозится», подтвердить и попробовать найти лучшее методы/алгоритмы исполнения.
quattro_ik_alg
Шаг 9:
Источник: http://mozgochiny.ru/electronics-2/chetveronogiy-robot-na-baze-arduino/
Картонный робот-пылесос на Arduino
Главная» 2016» Июнь» 26» Картонный робот-пылесос на Arduino
| Картонный робот-пылесос на Arduino |

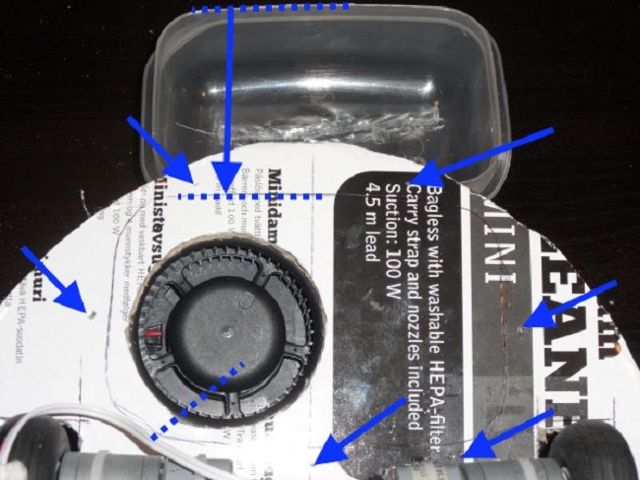
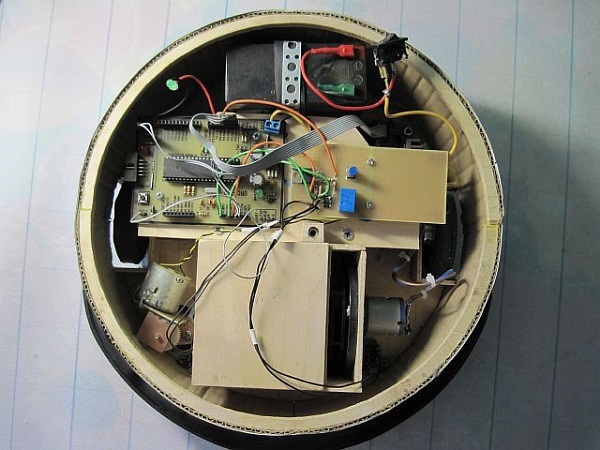
Введение На картоне определяется примерно расположение деталей, и вырезается круг подходящего размера (шасси пылесоса) На дне будущего робота вырезают отверстия под колёса, и под турбинку. Моторы крепят к картону с помощью пластиковых стяжек Далее, термоклеем к шасси закрепляют турбину Получается так, что турбина на верхней части картона, моторы — внизу На нижней стороне помечается контур пластиковой коробки (которая будет собирать пыль), вокруг этого контура автор делает сквозные отверстия и отмечает расположение магнитов. Магниты будут удерживать коробку на шасси. Теперь, с магниты прикладывают с нижней стороны, предварительно подложив лист бумаги под них Коробку для сбора пыли устанавливают между магнитами и приклеивают к ним Далее, уже на верхней стороне картона приклеивается аккумулятор и крепления для Arduino. В качестве креплений автор использует куски деревянных шпажекТеперь можно установить motor-shield и Arduino в крепления. Провода питания и Arduino отрезают до нужного размера. Провода питания рекомендовано спаять и изолировать. После чего их подключают к Arduino, турбине, аккумулятору и motor-shieldИз полосок имеющегося картона сгибают и склеивают бамперы полукругомБамперы крепят клеем к с боков шасси. Также шасси предварительно немного подрезали так чтоб установленные бамперы могли придавится к нему при столкновенииДалее, берут два проводника и соединяют их с кусочками жести термоклеемКуски жести приклеивают к бамперам, а их провода подключат к Arduino (к контактам 5 и 8). Вдобавок напротив них клеем закрепляют контакты еще двух проводников, которые присоединяют к контактам GND ArduinoВ качестве фильтра пыли используют вырезанный прямоугольник из кухонной салфетки. Фильтр кладут снизу шасси и закрепляют его коробкой с магнитамиВ коробке проделывают длинное отверстие с краями выгнутыми наружу. К коробке дополнительно приклеивают округлую опору (кусок пластика) так чтобы край отверстия был на расстоянии 1 мм над полом когда робот будет стоять на колесах и опираться на опору. Высота этой опоры регулирует проходимость роботаВысокие стенки коробки можно укоротить переклеиванием магнитовПрограмма://right side const int pinRightMotorDirection = 4;//»Dir A» on motor-shield |





 На верхней стороне шасси магниты приклеивают на ранее помеченных местах.
На верхней стороне шасси магниты приклеивают на ранее помеченных местах. 


Источник: https://mikrobord.do.am/blog/kartonnyj_robot_pylesos_na_arduino/2016-06-26-4
Робот-пылесос своими руками: схема, видео, инструкция по сборке
В современном ритме жизни не всегда получается поддерживать в доме чистоту. В этом деле поможет современные технологии. Робот-пылесос появился более 15 лет назад. Его типовой внешний вид напоминает крупную шайбу, которая передвигается по комнате по заданному алгоритму или случайным образом (пока на что-нибудь не наткнется) и собирает мусор. Предлагаем вам изучить 2 пошаговые инструкции, позволяющие сделать робот-пылесос своими руками.
Материалы для сборки
Итак, для сборки робота-пылесоса нужно разобраться с его составными частями, пойдем по порядку.
Он должен сам передвигаться по комнате, поэтому нужны двигатели, в зависимости от конечной конструкции их должно быть от 2-х до 4-х, а также возможность переключения направления вращения и скорость, значит, нужна плата для управления двигателями. Если вы используете двигатели постоянного тока, то нужна плата с 4-мя транзисторами (H-мост).
Самодельный робот-пылесос должен определять столкновения со стенами и мебелью. Для этого нужно предусмотреть датчики препятствия и концевые выключатели на «бампере». Также нужен сам рабочий орган – пылесос. При этом он должен быть рассчитан на работу от постоянного тока низкого напряжения (например, 12В).
Кроме пылесоса нужна подвижная (вращающаяся) щетка, которая будет отчищать поверхность, поднимать ворс половика, сметать мусор. Для этого нужен еще один или два моторчика.
Система, которая будет всем этим управлять. Простейший вариант на Arduino. Для такой задачи подойдет любая из плат, по размерам удобно разместить вариант Nano или Pro mini.
Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
- Аккумуляторы и контроллер заряда.
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:

Контроллер
Для управления двигателями привода робота удобно использовать модуль на L298-микросхеме. Схемотехнически это H-мост, вы можете его собрать своими руками из отдельных компонентов, но купить готовую плату будет надежнее. С его помощью вы можете задавать скорость движения робота-пылесоса и изменять направление вращения.
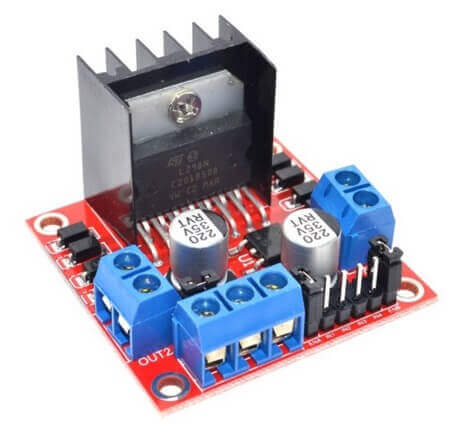
Модуль управления
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя.
При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0.
Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).

Схема на ардуино
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Колесная база
Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.

Сборка корпуса
Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

Бампер
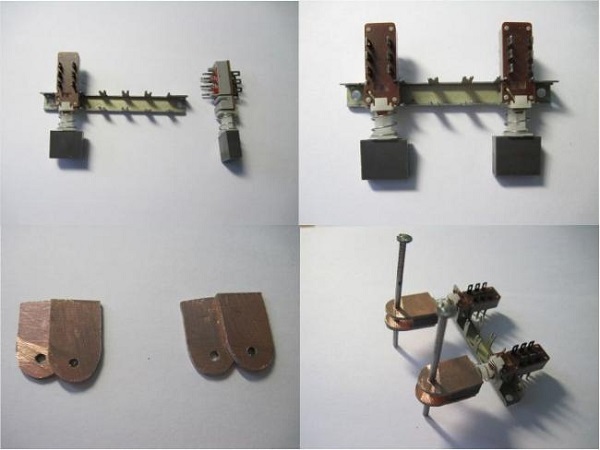
Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже.
При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания.
На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.

Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:
Схема пылесоса
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса. Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации.
Турбина робота
Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей
Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.
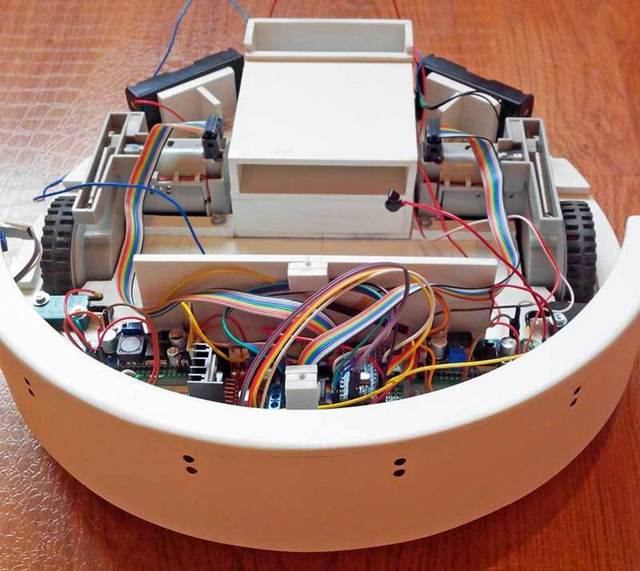
Идея №2: почти заводской робот
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:
Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
Всё это собрать по такой схеме:
Схема сборки робота-пылесоса
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.
Вот схема питания этого робота:
Схема питания
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.
В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов.
Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино.
Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
Источник: https://robotobzor.ru/o-robotah/kak-sdelat-robot-pylesos-svoimi-rukami.html
Как сделать робот-пылесос своими руками
Чтобы создать робот-пылесос своими руками, достаточно приобрести необходимый минимум теоретических знаний и набор легкодоступных комплектующих. Такой помощник будет поддерживать полы помещений в чистоте, экономить время на уборке.
Благодаря наличию специальных датчиков, механизм самостоятельно не только перемещается по комнате, но и ориентируется в ней.
Процесс изготовления в домашних условиях потребует затрат времени и терпения, но схема создания достаточно проста и доступна даже любителям, а затраченные на это средства гораздо ниже цены рыночных аппаратов.

Теоретические аспекты проблемы
Домашние умельцы вывели практическим путем требования к роботам-пылесосам, которых следует придерживаться при их создании. Результатом соблюдения будет механизм, пригодный к дальнейшей эксплуатации. Перечень основных правил следующий:
- рекомендуется изготавливать робот в форме небольшого цилиндра;
- для того, чтобы автомат мог осуществлять развороты на месте – колеса следует размещать по диаметру;
- дополнительному рулевому колесу привод не требуется;
- механизм должен собирать мусор в легко вынимаемый мусороприемник;
- робот обязательно должен быть оснащен контактным бампером, занимающим минимум половину его окружности;
- зарядку аппарата следует проводить от зарядного устройства, без его разборки;
- наилучшим местом размещения центра тяжести у робота являются колеса, также допускается располагать его рядом с ними;
- оптимальная скорость движения – от 25 до 35 см/с;
- двигатели работают совместно с редукторами, оснащенными пружинами.
Выделяются модели с шаговыми двигателями, что позволяет программно управлять ими без применения редукторов.
рейтинг роботов-пылесосов на 2017 год.
Способы обеспечения движения, уборки и питания робота-пылесоса
Движение роботизированного устройства в общем случае осуществляется двумя способами: по спирали (с центра наружу) и зигзагами. В микроконтроллеры можно также занести и схемы комнат по отдельности.
Пространственную ориентацию, объезд препятствия на пути следования пылесос осуществляет благодаря встроенным контактным и инфракрасным датчикам — они образуют систему обратной связи.
Инфракрасные регулируют движение, определяя расстояние до стен, предметов, перепады высот.
Контактные датчики срабатывают в бамперах при ударах о препятствия (подробнее о том, как работает прибор — в статье принципы работы роботов пылесосов).
Автоматизированный пылесос с автономным источником питания, конечно же, не развивает такую мощность всасывания, как ручной вариант. Практические испытания показали большую эффективность использования маленькой щетки совместно с всасывающей турбиной. Для уборки по углам передняя часть пылесоса оснащается 2 щетками, которые при работе подгребают мусор к главной.
Питание роботизированной системы можно осуществлять от нескольких аккумуляторов, напряжение на клеммах которых – 12 V (18 V), а его емкость равняется 7 А*ч. Зарядка осуществляется при прямом контакте либо беспроводным способом. Применение последнего увеличивает расходы на комплектующие детали.
Самостоятельный возврат робота к месту зарядки – сложная задача, которую можно решить установкой передающего маяка.
Любая автоматизированная модель собирается на базе контроллера (мозга системы). Поэтому следует изучить язык его программирования для занесения алгоритма команд.
Следует также учитывать интуитивную направленность командного интерфейса, что значительно облегчает процесс.
Как микроконтроллер, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений, поэтому пайка требуется редко.

Подготовка к практической реализации проекта
Рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560. Процесс создания будет состоять из нескольких этапов:
- подготовка инструментов и материалов;
- изготовление корпуса с колесами и отделом под мусор, пылесборника и турбины;
- монтаж датчиков и микроконтроллера, моторов с редукторами, аккумулятора, щеток;
- выполнение электрических подключений;
- введение программы в Arduino, определение согласованности датчиков;
- проверка работоспособности робота-пылесоса и его способности заряжаться самостоятельно.
Идея реализуется с помощью следующих материалов и инструментов:
- контроллер Arduino – 1 шт, с драйверами;
- лист фанеры (либо плотный картон) – 1 м.кв;
- колеса – 3 шт;
- провод сечением не более 0,75 мм.кв (подойдет витая пара) – около 2 м;
- блок питания – 4 аккумулятора по 18 V, индикатор заряда к ним, зарядное устройство;
- инфракрасные датчики – 4 шт, контактные – 2 шт;
- электродвигатели: для турбины – 1 шт, вращающий щетку – 1 шт, 2 мотора с редуктором обеспечивают передвижение;
- поливинилхлоридный корпус – 1 шт;
- клей – 1 упаковка, саморезы – 10 шт, скотч – 1 шт, набор магнитов;
- набор отверток и сверл, плоскогубцы, нож канцелярский, карандаш, линейка, шуруповерт, электролобзик.
выбор моющего робота пылесоса.
Сборка робота-пылесоса
Подготовив все необходимое можно приступать к сборке. Она заключается в прохождении вышеописанных этапов.
- Создаем корпус цилиндрической формы из картона либо поливинилхлорида: диаметр – 30 см, высота – 9 см, толщина стенок – 0,6 см. Дно лучше вырезать из фанеры.
- Закрепляем на корпусе поливинилхлоридный бампер при помощи скотча, предварительно установив в него датчики инфракрасные и реагирующие на удар.
Датчик соударений

Прикрепленный бампер
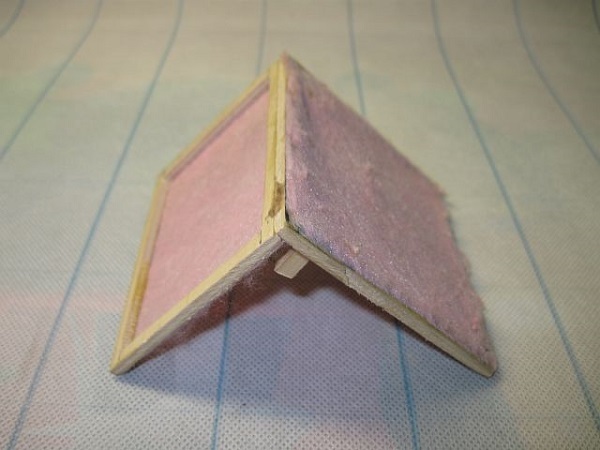
- Изготавливаем из картона или поливинилхлорида отсек для мусора с крышкой, закрепляемой магнитами.

- Делаем фильтр из тканевых салфеток.
- Делаем турбину из поливинилхлорида и компьютерных дисков, устанавливаем.
- Подключаем датчики к контроллеру: обычный рабочий режим соответствует логической единице, а срабатывание – нулю.
- Двигатель передней щетки подключаем к arduino mega 2560 через транзистор mosfet, что обеспечивает быстрое ее вращение по углам и довольно медленное по основной площади комнаты.
- Устанавливаем 4 аккумулятора (соединяем их попарно, каждую пару — последовательно) и зарядное устройство, подключаем их.
- Монтируем щетки, изготовленные самостоятельно из лески, и колеса (купленные либо снятые с подходящей игрушки) на дно.

Радиальная щетка
- Устанавливаем на arduino необходимые программы при помощи компьютера, которые можно найти в сети интернет.
- Проверяем закрепление всех компонентов к дну и стенкам корпуса.
- Вырезаем из картона или поливинилхлорида крышку, закрепляем ее саморезами.
Важным моментом работы является возвращение бампера в исходное положение после удара о препятствие, то есть достаточная его упругость.
Все детали закрепляются на имеющиеся для этих целей у них разъемы саморезами либо клеем, скотчем. Полученный результат представлен на фотографии:
Источник: http://Tehnika.expert/dlya-chistoty-i-poryadka/pylesos/robot-svoimi-rukami.html
Робот-пылесос своими руками: описание и схемы сборки
Как сделать робот-пылесос?
4.5 (90%) 2 votes
Сейчас популярность роботизированных домашних уборщиков все возрастает с каждым днем. Это обосновано тем, что данные устройства способны поддерживать покрытия вашего пола в чистоте и при этом не отнимать у вас времени.
Их главным отличием от управляемых человеком собратьев является то, что очистка поверхности, перемещение и ориентирование в пространстве осуществляются устройством самостоятельно.
Этого удалось достичь благодаря наличию специальных датчиков, которые контролируют смену режима работы, перемещение и подзарядку пылесоса.
Основная проблема заключается в том, что приобрести робот-пылесос на рынке сейчас достаточно проблематично. Далеко не везде удается подобрать подходящую модель, да и ценовая политика некоторых реализаторов устраивает далеко не всех. Однако не стоит отчаиваться.
У вас всегда есть возможность создать самодельный робот-пылесос.
Само собой, сделать такое устройство своими руками и в домашних условиях — это весьма длительный процесс, который потребует терпения, определенного набора материалов и инструментов, а также навыков работы с подобного рода техникой.
Схема создания робота-пылесоса в домашних условиях вполне постижима даже для любителя. Однако в процесс создания подобного рода механизмов необходимо вникнуть и выяснить все нюансы предстоящей операции. В противном случае вы лишь зря потратите время и средства.

Робот-пылесос своими руками
Если вы хотите создать механизм, который будет идеально подходить для очистки поверхностей пола в вашем доме, вам следует внимательно соблюдать все правила, которые предписывает схема сборки, представленная в следующем пункте.
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;

Самодельный робот-пылесос
- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
В каких случаях вы чаще всего покупаете новый телефон?
- Сразу, как только выходит новая модель 48 ( 1.33 % )
- Когда текущиая модель совсем устареет морально и физически 941 ( 26.17 % )
- Только когда старый сломается/потеряется 2064 ( 57.4 % )
- Когда выходит модель, которая уже значительно отличается от моей по функциям 458 ( 12.74 % )
- Другое 85 ( 2.36 % )
Схема сборки робота-пылесоса в домашних условиях
Чтобы правильно сделать робот-пылесос своими руками, необходимо придерживаться следующего алгоритма (схема должна выполняться в четко указанной последовательности):
- Загрузить необходимое программное обеспечение. Если вы хотите сделать свой робот-пылесос максимально похожим на заводские аналоги (исходя из выполняемых функций), вам нужно будет загрузить на микроконтроллер «Ардуино» необходимое программное обеспечение. Это можно сделать при помощи обыкновенного персонального компьютера — достаточно лишь загрузить код на плату «Ардуино».
- Закрепить основные компоненты. Чтобы средства передвижения робота-пылесоса, кулер, микросхемы, аккумуляторы и вся прочая начинка устройства были надежно закреплены, вам потребуется фанерная основа. Она же по совместительству будет днищем вашего пылесоса. Туда же крепятся предварительно склеенные между собой при помощи суперклея турбина и емкость для сбора отходов. Также контейнер должен быть оборудован специальной трубкой, через которую будет выводиться выдуваемый воздух. Она должна быть защищена плотной тканью, которая послужит средством фильтрации. Кулер должен быть последовательно склеен со всеми сервоприводами, после чего посажен на все ту же фанерную площадку, на которой к тому времени уже должны быть монтированы микросхемы и аккумуляторы для подпитки устройства. Колеса для робота пылесоса могут быть куплены на рынке (однако вы можете предпринять попытку сделать их своими руками из консервной банки).

Механическая часть робота-пылесоса
- Установить бампер. В этой модели он изготавливается из поливинилхлорида. Однако возможны и металлические аналоги. В любом случае при столкновении он должен физически воздействовать на переключатель, который заставит аппарат двигаться в другую сторону. Также стоит отметить, что после столкновения бампер должен возвращаться на первоначальное место.
- Установить корпус. Чтобы все содержимое конструкции было надежно защищено, лучше всего использовать корпус из поливинилхлорида. При этом на нем можно сделать надрезы, чтобы он лучше снимался. Крышка корпуса крепится при помощи магнитов. В идеале их должно быть не менее 8 (приветствуются вариации, в которых использовано большее их количество).
Изготовление робота-пылесоса в домашних условиях
Необходимые материалы
Что для вас предпочтительней: живое общение, или любимый мессенджер?
Общение — это когда видишь собеседника лично. Все остальное — иллюзия общения. 448 ( 32.35 % )
Не люблю общаться с людьми в живую, написать сообщение мне прозе и удобней. 117 ( 8.45 % )
Общаюсь и в живую, и в соц сетях. Один способ вовсе не исключает другой. 820 ( 59.21 % )
Чтобы сделать робот-пылесос своими руками, вам потребуются следующие материалы:
- «Ардуино Про Мини» — главный мозг и информационный центр всей конструкции.
- Драйвер моторов робота-пылесоса серии Л298Н.
- Понижающий преобразователь переменного тока.
- Модуль с мосфетом, посредством которого будет осуществляться контроль над темпом работы передней щетки устройства.
- 4 инфракрасных датчика, которые будут фиксировать наличие препятствий на пути робота пылесоса.
- Пара переключателей, которые будут изменять направление движение устройства при столкновении.
- 3 шарообразных колеса.

Колеса для самодельного робота-пылесоса
- Мотор, обеспечивающий вращение щетки в различных режимах.
- Мотор высокой мощности, обеспечивающий нормальное функционирование турбины.
- 4 литийионных аккумулятора, а также средство контроля над ними.
- Фанерное основание нужного размера.
- Корпус из поливинилхлорида нужного размера.
- 8 пар магнитов для крепления.
- Провода, кабели, переключатели и прочие элементы электрической сети.

Автор, специалист в сфере IT и новых технологий.
Получил высшее образование по специальности Фундаментальная информатика и информационные технологии в Московском государственном университете имени М.В. Ломоносова. После этого стал экспертом в известном интернет-издании. Спустя время, решил попробовать писать статьи самостоятельно. Ведет популярный блог на Ютубе и делится интересной информацией из мира технологий.
Источник: https://proumnyjdom.ru/texnika-dlya-doma/robot-pylesos-svoimi-rukami.html
Робот-пылесос Ардуино своими руками: схема, инструкция, как сделать, составляющие
Перейти к контенту
Робот-пылесос своими руками Ардуино изготавливается из подручных материалов. Оборудование способно перемещаться по комнате, изменять направление движения после контакта с посторонними предметами и удалять пыль с поверхности пола.

Требуемые компоненты
Для сборки пылесоса на Ардуино потребуются компоненты:
- блок управления;
- отдельный контроллер для управления работой электродвигателей (обозначается на схемах как H-Bridge);
- электрические двигатели постоянного тока с редукторами для привода боковых колес;
- комплект колес;
- источник питания (аккумуляторы или батарейки, суммарное напряжение 5 В);
- турбина (используется узел, предназначенный для охлаждения процессоров или чипов видеокарт);
- адаптер питания (при использовании компонентов, рассчитанных на напряжение 12 В);
- комплект магнитов;
- коммутационный шнур USB;
- комплект кабелей для подключения блока Ардуино к цепям оборудования;
- листовой плотный картон;
- термический клей в тубе;
- пистолет для нанесения клея;
- резервуар для сбора пыли (готовый пластиковый или металлический контейнер);
- пластиковые хомуты;
- металлическая банка от напитков (для изготовления крепежных элементов).

Процесс сборки
Пошаговый процесс сборки робота-пылесоса Ардуино:
- Разложить компоненты конструкции будущего изделия на ровной поверхности для определения взаимного расположения и габаритов корпуса.
- Вырезать из картона круглое основание.
- Выполнить на детали прорези для боковых колес, которые располагаются по поперечной оси симметрии.
- Закрепить электрические приводы колес пластиковыми хомутами к корпусу.
- Прорезать канал для забора воздуха и зафиксировать клеем турбину над полученным окном. Узел крепится на противоположной от двигателей ходовой части стороне поддона.
- Разметить зону установки контейнера для пыли, который размещается над окном с роторным рабочим колесом.
- Установить и закрепить термическим клеем на внутренней части магниты (по предварительно размеченному контуру резервуара для пыли). Ответные магнитные элементы размещаются через лист бумаги на противоположной стороне поддона. Емкость для пыли приклеивается к магнитам, которые плотно прижимаются к боковой поверхности резервуара. Лист бумаги удаляется, коробка удерживается на запланированной монтажной точке взаимным притяжением магнитов.
- Закрепить на верхней плоскости поддона аккумуляторную батарею и контроллер Ардуино. Допускается установка элементов в направляющие узлы, изготовленные из древесины или пластика. Пользователи используют стандартные блоки управления Ардуино, часть владельцев самостоятельно корректирует прошивку микропроцессора путем подключения изделия к компьютеру.
- Разместить блок H-Bridge поверх контроллера и соединить электронику пылесоса с аккумулятором. Для соединения кабелей применяется пайка и установка коммутационных штекеров.
- Подключить электрические двигатели к выводам блоков управления.
- Вырезать картонные заготовки для фронтального бампера. Детали монтируются на передней части корпуса, точка соединения допускает перемещение бампера после столкновения робота с препятствием.
- Припаять отрезки кабеля к прямоугольным жестяным пластинам (требуется изготовить 2 элемента). Металлические пластинки устанавливаются на расстоянии от внутренней стороны импровизированных бамперов. На внутренней поверхности бампера наклеивается фольга, на которую подается положительное напряжение от батареи. При столкновении пластинка соединяется с фольгой и работает как датчик препятствия. В сигнальной цепи от пластины устанавливается дополнительное сопротивление, снижающее риск ложных срабатываний.
Для очистки воздуха от пыли применяется фрагмент от кухонной салфетки, изготовленной из волокнистого синтетического материала. Элемент устанавливается под основанием контейнера пылесборника и удерживается магнитами.
В самом контейнере прорезается прямоугольный канал, через который затягивается воздух с пылью. Для регулировки зазора между резервуаром и напольным покрытием применяется сменное дистанционное кольцо из картона или пробки.

Источник: https://Tehno.expert/pylesos/robot-arduino-svoimi-rukami.html
Робот пылесос на ардуино
Science Vetal
Показано, как делать робот-пылесос. Он автоматически объезжает препятствия и пылесосит, при этом собирает бумажки, крошки различного происхождения.
Нужен стандартный набор для arduino машинки. Берём одну arduino uno, драйвер двигателя l298n, датчик приближенности, старый вентилятор и системного блока компьютера. Сначала взял толстую гофрокартон, вырвали снимок кружок, установил вентилятор, размер. Начал вырезать. Размер восьмиугольника должен быть несколько меньше вентилятора.
Затем взял вентилятор и попробовал вставить туда в отверстие. Думал, что контур немного растянется. Но так не случилось. Немного подрезал и только после этого получилось установить вентилятор. Высота вентилятора над столом должно получиться небольшой, около 0,5 см. Только при этом он будет хорошо всасывать пыль. Затем установил двигатели и приклеил всё с помощью термоклея.
В том числе и вентилятор. Его нужно клеить после того, как установлены моторы, чтобы видеть необходимо высоту. Практика показала, что хорошо будет всасываться мусор, если высота над столом от 0,5 до 1 см. Затем занялся установкой еще одного колеса, чтобы это система стояла на трех колесах. Третье колесо вращается не будет.
Все элементы пылесоса присоединяется с помощью термоклея.
Для подобного устройства такой прочности предостаточно.
Мастера покупают изобретения в лучшем китайском интернет-магазине.


Электроника для самодельщиков в китайском магазине.
Кашаса всасывание мусор зависит от скорости работы, она не должна быть большой. Необходимо вставить глаза. Используем датчик ультразвуковой для arduino.
Кнопка установил сбоку, но практика показала, что это не совсем правильное решение, потому что робот сам себя несколько раз отключал. Он ударился о стену именно этой кнопкой. В принципе, это не совсем классический пылесос, потому что обычно используется коробка. А здесь стоит прямо на всасывание. Но это не ухудшает характеристик.
Обратите внимание, что мастер взял обычный вентилятор, не предназначен для того, чтобы сосать были. Он просто дует воздух. Поэтому, если вы хотите создать пылесос, который будет сосать не только бумагу, то нужно установить двигатель помощнее. И придать лопастями необходимую для пылесоса конфигурацию. Весь процесс создания робота занял около 3 часов. Как видите, ничего сложного нет.
Самое сложное в этом деле, это программирование. В этом случае мастер программируют лишь немного. Он взял свою машину, который объезжает препятствия, и чуть-чуть изменил, чтобы ограничить скорость передвижения робота. Для этого применил шим выводы на arduino и подключил их соответствующим выводом на драйвере двигателя. Кстати, он не такой и маленький расчёт радиатора.
Но у него есть большой плюс по сравнению с другими драйверами двигателей. А именно, вывод на 50. Им очень удобно, сервоприводы а также arduino. Если вам не нравится большой размер этого драйвера, то можно просто взять и убрать оттуда радиатор. Дело в том, что при использовании этих двух двигателей, он греется не сильно. Температура не поднимается выше 40 градусов.
Схема получает питание с аккумулятора с через выключатель и nano драйвер двигателя. Сюда же подключен и вентилятор.
Источник: https://izobreteniya.net/robot-pyilesos-na-arduino/
