Но подобные роботы дорогостоящие и не каждый может себе позволить столь полезное приобретение, как в прочем и нанять уборщицу, которая за определенную сумму будет производить уборку. В результате остается несколько вариантов для решения столь не очень приятной задачи. Некоторые всё же возьмутся за тряпку и моющие средства, а другие сделают робота уборщика собственными руками. О том, как сделать простенького робота и пойдет речь в данной статье. Однако робот, сделанный своими руками, не решит все задачи связанные с уборкой, но натереть стол и пол до блеска вполне сможет.
Итак, для начала разберемся с материалами необходимыми для создания робота уборщика.
- Пластиковая тарелка или тарелка фрисби
- 3 небольшие щетки для пола
- 2 вентилятора от компьютера
- 3 регулировочных крепления
- Батарея 9V и разъем для батареи
- Стяжки или хомуты самозащелкивающиеся
- Болты и гайки

Подготовив все необходимые элементы можно приступать к создания робота уборщика. Для начала на концах щеток просверлите отверстия.

При помощи болтов и гаек к каждой щетке прикрутите регулировочное крепление.

В пластиковой тарелке просверлите шесть отверстий для крепления щеток. Для наглядности смотрите фотографию ниже. Обратите внимание, что каждая пара отверстий равно удалена друг от друга.

Крепление щеток к тарелке является следующим этапом создания робота уборщика. Для крепления используйте болты и гайки. Ползунки регулировочных креплений установите в среднее положение.

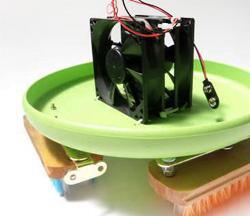
Для того чтобы робот уборщик двигался, необходимо создать двигатель. Для этого у вентилятора аккуратно выломайте три лопасти. У второго вентилятора, так же выломайте три лопасти, только в другой последовательности.

Далее между вентиляторами зажмите батарейку. При этом вентиляторы должны быть направлены передней (лицевой) стороной к батарейке.

Вентиляторы с зажатой внутри батарейкой закрепите при помощи стяжек. Вентиляторы должны быть расположены параллельно друг к другу. Вибромотор готов.


Робот уборщик почти готов, нужно только прикрепить вибромотор из вентиляторов и батарейки. Для этого в тарелке просверлите 8 отверстий как на фотографии ниже. При помощи стяжек прикрепите моторчик к центру тарелки.
Далее накиньте клеммы, и робот уборщик начнет свою работу. Возможно, при движении робот будет уходить в стороны. Для того, чтобы робот уборщик устойчиво крутился, поправьте регулировочные крепления.
Как видите, робот не требует особых навыков и денежных затрат. Для создания робота использовались недорогие материалы, некоторые из которых, например вентиляторы, можно извлечь из старого компьютера. Ниже вы можете узнать каков робот уборщик в действии.
Источник: https://timerobots.ru/roboty-svoimy-rykami/445-robot-uborshchik.html
Робот-пылесос своими руками: схема, видео, инструкция по сборке
В современном ритме жизни не всегда получается поддерживать в доме чистоту. В этом деле поможет современные технологии. Робот-пылесос появился более 15 лет назад. Его типовой внешний вид напоминает крупную шайбу, которая передвигается по комнате по заданному алгоритму или случайным образом (пока на что-нибудь не наткнется) и собирает мусор. Предлагаем вам изучить 2 пошаговые инструкции, позволяющие сделать робот-пылесос своими руками.
Материалы для сборки
Итак, для сборки робота-пылесоса нужно разобраться с его составными частями, пойдем по порядку.
Он должен сам передвигаться по комнате, поэтому нужны двигатели, в зависимости от конечной конструкции их должно быть от 2-х до 4-х, а также возможность переключения направления вращения и скорость, значит, нужна плата для управления двигателями. Если вы используете двигатели постоянного тока, то нужна плата с 4-мя транзисторами (H-мост).
Самодельный робот-пылесос должен определять столкновения со стенами и мебелью. Для этого нужно предусмотреть датчики препятствия и концевые выключатели на «бампере». Также нужен сам рабочий орган – пылесос. При этом он должен быть рассчитан на работу от постоянного тока низкого напряжения (например, 12В).
Кроме пылесоса нужна подвижная (вращающаяся) щетка, которая будет отчищать поверхность, поднимать ворс половика, сметать мусор. Для этого нужен еще один или два моторчика.
Система, которая будет всем этим управлять. Простейший вариант на Arduino. Для такой задачи подойдет любая из плат, по размерам удобно разместить вариант Nano или Pro mini.
Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
- Аккумуляторы и контроллер заряда.
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:
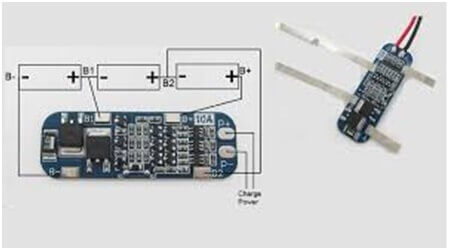
Контроллер
Для управления двигателями привода робота удобно использовать модуль на L298-микросхеме. Схемотехнически это H-мост, вы можете его собрать своими руками из отдельных компонентов, но купить готовую плату будет надежнее. С его помощью вы можете задавать скорость движения робота-пылесоса и изменять направление вращения.
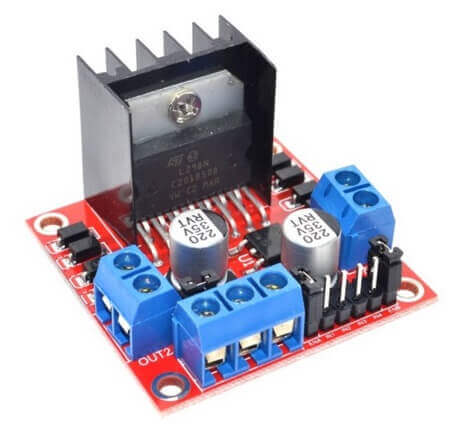
Модуль управления
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя.
При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0.
Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).

Схема на ардуино
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Колесная база
Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.

Сборка корпуса
Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

Бампер
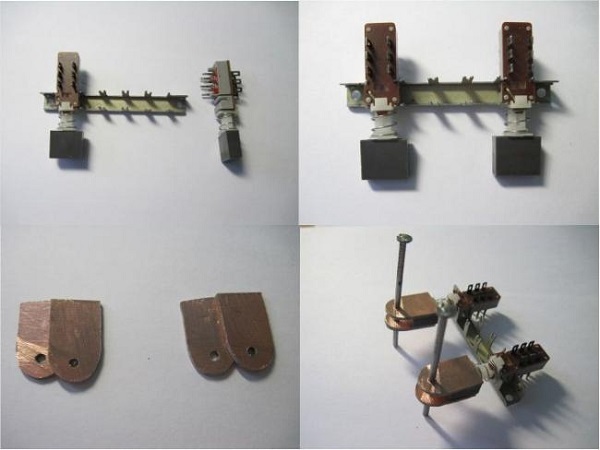
Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже.
При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания.
На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.

Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:
Схема пылесоса
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса. Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации.
Турбина робота
Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей
Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.
Идея №2: почти заводской робот
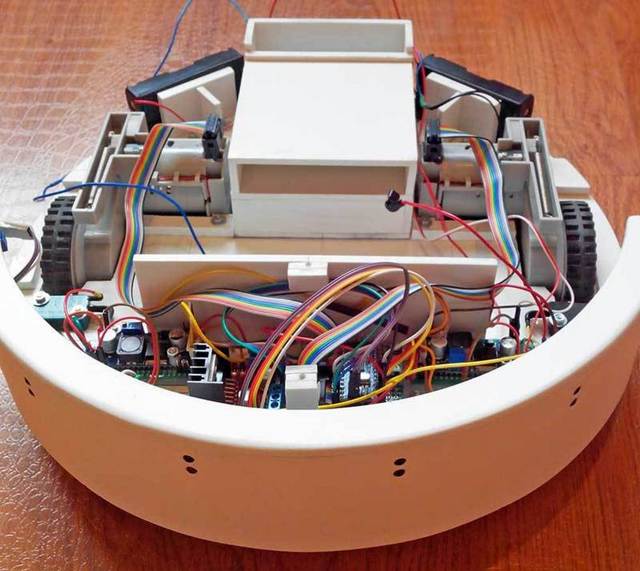
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:
Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
Всё это собрать по такой схеме:
Схема сборки робота-пылесоса
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.
Вот схема питания этого робота:
Схема питания
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.
В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов.
Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино.
Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
Источник: https://robotobzor.ru/o-robotah/kak-sdelat-robot-pylesos-svoimi-rukami.html
Как сделать робот-пылесос своими руками
Чтобы создать робот-пылесос своими руками, достаточно приобрести необходимый минимум теоретических знаний и набор легкодоступных комплектующих. Такой помощник будет поддерживать полы помещений в чистоте, экономить время на уборке.
Благодаря наличию специальных датчиков, механизм самостоятельно не только перемещается по комнате, но и ориентируется в ней.
Процесс изготовления в домашних условиях потребует затрат времени и терпения, но схема создания достаточно проста и доступна даже любителям, а затраченные на это средства гораздо ниже цены рыночных аппаратов.

Теоретические аспекты проблемы
Домашние умельцы вывели практическим путем требования к роботам-пылесосам, которых следует придерживаться при их создании. Результатом соблюдения будет механизм, пригодный к дальнейшей эксплуатации. Перечень основных правил следующий:
- рекомендуется изготавливать робот в форме небольшого цилиндра;
- для того, чтобы автомат мог осуществлять развороты на месте – колеса следует размещать по диаметру;
- дополнительному рулевому колесу привод не требуется;
- механизм должен собирать мусор в легко вынимаемый мусороприемник;
- робот обязательно должен быть оснащен контактным бампером, занимающим минимум половину его окружности;
- зарядку аппарата следует проводить от зарядного устройства, без его разборки;
- наилучшим местом размещения центра тяжести у робота являются колеса, также допускается располагать его рядом с ними;
- оптимальная скорость движения – от 25 до 35 см/с;
- двигатели работают совместно с редукторами, оснащенными пружинами.
Выделяются модели с шаговыми двигателями, что позволяет программно управлять ими без применения редукторов.
рейтинг роботов-пылесосов на 2017 год.
Способы обеспечения движения, уборки и питания робота-пылесоса
Движение роботизированного устройства в общем случае осуществляется двумя способами: по спирали (с центра наружу) и зигзагами. В микроконтроллеры можно также занести и схемы комнат по отдельности.
Пространственную ориентацию, объезд препятствия на пути следования пылесос осуществляет благодаря встроенным контактным и инфракрасным датчикам — они образуют систему обратной связи.
Инфракрасные регулируют движение, определяя расстояние до стен, предметов, перепады высот.
Контактные датчики срабатывают в бамперах при ударах о препятствия (подробнее о том, как работает прибор — в статье принципы работы роботов пылесосов).
Автоматизированный пылесос с автономным источником питания, конечно же, не развивает такую мощность всасывания, как ручной вариант. Практические испытания показали большую эффективность использования маленькой щетки совместно с всасывающей турбиной. Для уборки по углам передняя часть пылесоса оснащается 2 щетками, которые при работе подгребают мусор к главной.
Питание роботизированной системы можно осуществлять от нескольких аккумуляторов, напряжение на клеммах которых – 12 V (18 V), а его емкость равняется 7 А*ч. Зарядка осуществляется при прямом контакте либо беспроводным способом. Применение последнего увеличивает расходы на комплектующие детали.
Самостоятельный возврат робота к месту зарядки – сложная задача, которую можно решить установкой передающего маяка.
Любая автоматизированная модель собирается на базе контроллера (мозга системы). Поэтому следует изучить язык его программирования для занесения алгоритма команд.
Следует также учитывать интуитивную направленность командного интерфейса, что значительно облегчает процесс.
Как микроконтроллер, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений, поэтому пайка требуется редко.

Подготовка к практической реализации проекта
Рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560. Процесс создания будет состоять из нескольких этапов:
- подготовка инструментов и материалов;
- изготовление корпуса с колесами и отделом под мусор, пылесборника и турбины;
- монтаж датчиков и микроконтроллера, моторов с редукторами, аккумулятора, щеток;
- выполнение электрических подключений;
- введение программы в Arduino, определение согласованности датчиков;
- проверка работоспособности робота-пылесоса и его способности заряжаться самостоятельно.
Идея реализуется с помощью следующих материалов и инструментов:
- контроллер Arduino – 1 шт, с драйверами;
- лист фанеры (либо плотный картон) – 1 м.кв;
- колеса – 3 шт;
- провод сечением не более 0,75 мм.кв (подойдет витая пара) – около 2 м;
- блок питания – 4 аккумулятора по 18 V, индикатор заряда к ним, зарядное устройство;
- инфракрасные датчики – 4 шт, контактные – 2 шт;
- электродвигатели: для турбины – 1 шт, вращающий щетку – 1 шт, 2 мотора с редуктором обеспечивают передвижение;
- поливинилхлоридный корпус – 1 шт;
- клей – 1 упаковка, саморезы – 10 шт, скотч – 1 шт, набор магнитов;
- набор отверток и сверл, плоскогубцы, нож канцелярский, карандаш, линейка, шуруповерт, электролобзик.
выбор моющего робота пылесоса.
Сборка робота-пылесоса
Подготовив все необходимое можно приступать к сборке. Она заключается в прохождении вышеописанных этапов.
- Создаем корпус цилиндрической формы из картона либо поливинилхлорида: диаметр – 30 см, высота – 9 см, толщина стенок – 0,6 см. Дно лучше вырезать из фанеры.
- Закрепляем на корпусе поливинилхлоридный бампер при помощи скотча, предварительно установив в него датчики инфракрасные и реагирующие на удар.
Датчик соударений

Прикрепленный бампер
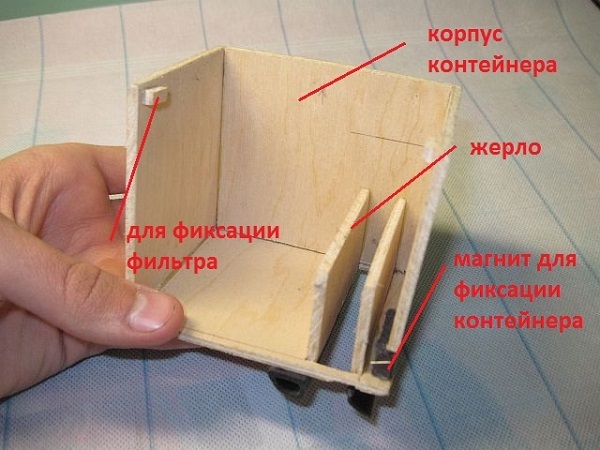
- Изготавливаем из картона или поливинилхлорида отсек для мусора с крышкой, закрепляемой магнитами.
- Делаем фильтр из тканевых салфеток.

- Делаем турбину из поливинилхлорида и компьютерных дисков, устанавливаем.
- Подключаем датчики к контроллеру: обычный рабочий режим соответствует логической единице, а срабатывание – нулю.
- Двигатель передней щетки подключаем к arduino mega 2560 через транзистор mosfet, что обеспечивает быстрое ее вращение по углам и довольно медленное по основной площади комнаты.
- Устанавливаем 4 аккумулятора (соединяем их попарно, каждую пару — последовательно) и зарядное устройство, подключаем их.
- Монтируем щетки, изготовленные самостоятельно из лески, и колеса (купленные либо снятые с подходящей игрушки) на дно.

Радиальная щетка
- Устанавливаем на arduino необходимые программы при помощи компьютера, которые можно найти в сети интернет.
- Проверяем закрепление всех компонентов к дну и стенкам корпуса.
- Вырезаем из картона или поливинилхлорида крышку, закрепляем ее саморезами.
Важным моментом работы является возвращение бампера в исходное положение после удара о препятствие, то есть достаточная его упругость.
Все детали закрепляются на имеющиеся для этих целей у них разъемы саморезами либо клеем, скотчем. Полученный результат представлен на фотографии:

Источник: http://Tehnika.expert/dlya-chistoty-i-poryadka/pylesos/robot-svoimi-rukami.html
Домашний робот уборщик. — DRIVE2
Всем привет!
Совсем недавно видел печальную картину в сообществе «Анекдоты», про робота пылесоса который размазюкал по всей квартире экскременты собаки. Но запись уже удалили… Я даже в страшном сне не мог такого представить.
И тут я вспомнил о своем подарке жене, который уже пол года трудится у нас в квартире.По работе и учебе был связан с робототехникой и поэтому для дома тоже захотелось купить помощника в уборке, в виде робота. С рождением ребенка не всегда получается убираться большим пылесосом.
- Не буду рекламировать и советовать к покупке, а просто расскажу, что это такое.
- Первый запуск:
Данная модель в отличии от многих других имеет встроенную камеру и записывает с помощью нее карту квартиры. Он может работать хаотично, но работа по заданной траектории гораздо эффективнее по времени и качеству уборки. Хаотичный режим 1 раз для проверки включил и забыл, т.к он не позволяет с уверенностью сказать что робот пройдет по всем местам и заедет в каждую комнату.

Траектории уборки
Благодаря сенсорам, и гироскопу которые входят в общую систему навигации выполняет интеллектуальную уборку совершенно самостоятельно. После уборки сам возвращается на зарядную базу, как делают многие роботы. Об косяки он стукается, но не сильно, при сближении с препятствием замедляет свой ход.
Чтобы огородить заезд в не нужную комнату или допустим лестницу в многоэтажном доме, на пол прокладывается магнитная лента. За все время эксплуатации он 1 раз ее отодвинул и прорвался в зал на ковер и застрял в диване… Но замечу, ленту мы не клеили на двухсторонний скотч и иногда ее сматываем и убираем.
Можно же закрыть дверь.

Сенсоры
Может заезжать на довольно таки высокие пороги.
И ездить по ковру с высоким ворсом, но смысла в этом практически ноль и быстро портятся щетки. Которые все равно придется менять в течении года.
Назвать данного робота — пылесосом, конечно язык не поворачивается, но собрать как веник он может многое.

Сбор мусора
- В своей конструкции он имеет 2 боковые щетки и центральную турбощетку, которая и засасывает- загребает весь мусор в контейнер.

Конструкция
- Также есть возможность влажной уборки по средствам микрофибры, которая мочится в воде и крепится на нижнюю часть вставной площадки к роботу по средствам липучки.

Поломойка
Я ей пользовался 1 раз, чисто попробовать, смысла ноль, т.к большое ощущение, что ты сам моешь пол и быстрее это реально произвести шваброй или руками с тряпкой. Если был бы контейнер с водой, а такие пылесосы существуют, то смысл был бы в данной операции.

Веник обычный
Да и сам робот можно по старинке заменить обычным веником, но! Я реально им махать не умею, не всегда дома, а жене некогда, ребенок отнимает много времени. А обычный пылесос в любом случае шумит гораздо громче.
У робота уровень шума остается на достаточно низком уровне – всего около 55 дБ. Да и включил его на уборку и пошел гулять, приходишь, а он уже на базе, в квартире нет песка с колес коляски, ниток, волос, шерсти и т.д.
Заряда литий-ионного аккумулятора хватает с запасом на 2-3 уборки, производитель уверяет что 160 мин или до 200 квадратных метров, что для обычной средней квартиры очень хорошо.
И если робот не успел убрать всю площадь до момента разрядки аккумулятора, то он просто прервется на зарядку, на дисплее будет гореть слово — База, он до нее доедет, а после зарядки продолжит свою работу.
Время полной зарядки аккумулятора всего 100 минут.

В комплекте также есть пульт, хрен знает для чего, возможно, что бы возить продукты, животных и детей из комнаты в комнату!
И самое главное, что хочу заметить, он живет у нас в кладовке — база там. Рядом стоит большой пылесос и есть розетка. Каждые выходные я пылесошу всю квартиру и чищу его минут 15. Иначе после недельной эксплуатации он столько волос и шерсти от животного набирает и сразу выдает ошибку забитости щеток и контейнера для сбора мусора.
В ближайшем будущем думаю будут более технологичные и менее дорогие роботы, а пока что это баловство, спасибо за внимание!
Источник: https://www.drive2.ru/b/2750018/
Робот-пылесос своими руками: описание и схемы сборки
Как сделать робот-пылесос?
4.5 (90%) 2 votes
Сейчас популярность роботизированных домашних уборщиков все возрастает с каждым днем. Это обосновано тем, что данные устройства способны поддерживать покрытия вашего пола в чистоте и при этом не отнимать у вас времени.
Их главным отличием от управляемых человеком собратьев является то, что очистка поверхности, перемещение и ориентирование в пространстве осуществляются устройством самостоятельно.
Этого удалось достичь благодаря наличию специальных датчиков, которые контролируют смену режима работы, перемещение и подзарядку пылесоса.
Основная проблема заключается в том, что приобрести робот-пылесос на рынке сейчас достаточно проблематично. Далеко не везде удается подобрать подходящую модель, да и ценовая политика некоторых реализаторов устраивает далеко не всех. Однако не стоит отчаиваться.
У вас всегда есть возможность создать самодельный робот-пылесос.
Само собой, сделать такое устройство своими руками и в домашних условиях — это весьма длительный процесс, который потребует терпения, определенного набора материалов и инструментов, а также навыков работы с подобного рода техникой.
Схема создания робота-пылесоса в домашних условиях вполне постижима даже для любителя. Однако в процесс создания подобного рода механизмов необходимо вникнуть и выяснить все нюансы предстоящей операции. В противном случае вы лишь зря потратите время и средства.

Робот-пылесос своими руками
Если вы хотите создать механизм, который будет идеально подходить для очистки поверхностей пола в вашем доме, вам следует внимательно соблюдать все правила, которые предписывает схема сборки, представленная в следующем пункте.
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;

Самодельный робот-пылесос
- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
В каких случаях вы чаще всего покупаете новый телефон?
- Сразу, как только выходит новая модель 48 ( 1.34 % )
- Когда текущиая модель совсем устареет морально и физически 941 ( 26.19 % )
- Только когда старый сломается/потеряется 2061 ( 57.36 % )
- Когда выходит модель, которая уже значительно отличается от моей по функциям 458 ( 12.75 % )
- Другое 85 ( 2.37 % )
Схема сборки робота-пылесоса в домашних условиях
Чтобы правильно сделать робот-пылесос своими руками, необходимо придерживаться следующего алгоритма (схема должна выполняться в четко указанной последовательности):
- Загрузить необходимое программное обеспечение. Если вы хотите сделать свой робот-пылесос максимально похожим на заводские аналоги (исходя из выполняемых функций), вам нужно будет загрузить на микроконтроллер «Ардуино» необходимое программное обеспечение. Это можно сделать при помощи обыкновенного персонального компьютера — достаточно лишь загрузить код на плату «Ардуино».
- Закрепить основные компоненты. Чтобы средства передвижения робота-пылесоса, кулер, микросхемы, аккумуляторы и вся прочая начинка устройства были надежно закреплены, вам потребуется фанерная основа. Она же по совместительству будет днищем вашего пылесоса. Туда же крепятся предварительно склеенные между собой при помощи суперклея турбина и емкость для сбора отходов. Также контейнер должен быть оборудован специальной трубкой, через которую будет выводиться выдуваемый воздух. Она должна быть защищена плотной тканью, которая послужит средством фильтрации. Кулер должен быть последовательно склеен со всеми сервоприводами, после чего посажен на все ту же фанерную площадку, на которой к тому времени уже должны быть монтированы микросхемы и аккумуляторы для подпитки устройства. Колеса для робота пылесоса могут быть куплены на рынке (однако вы можете предпринять попытку сделать их своими руками из консервной банки).
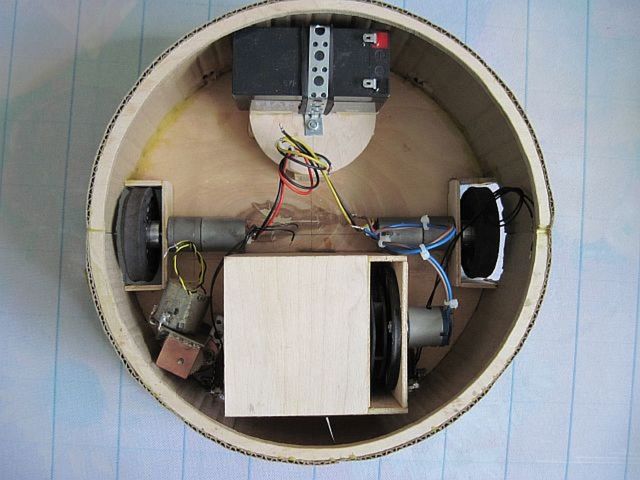
Механическая часть робота-пылесоса
- Установить бампер. В этой модели он изготавливается из поливинилхлорида. Однако возможны и металлические аналоги. В любом случае при столкновении он должен физически воздействовать на переключатель, который заставит аппарат двигаться в другую сторону. Также стоит отметить, что после столкновения бампер должен возвращаться на первоначальное место.
- Установить корпус. Чтобы все содержимое конструкции было надежно защищено, лучше всего использовать корпус из поливинилхлорида. При этом на нем можно сделать надрезы, чтобы он лучше снимался. Крышка корпуса крепится при помощи магнитов. В идеале их должно быть не менее 8 (приветствуются вариации, в которых использовано большее их количество).
Изготовление робота-пылесоса в домашних условиях
Необходимые материалы
Что для вас предпочтительней: живое общение, или любимый мессенджер?
Общение — это когда видишь собеседника лично. Все остальное — иллюзия общения. 446 ( 32.25 % )
Не люблю общаться с людьми в живую, написать сообщение мне прозе и удобней. 117 ( 8.46 % )
Общаюсь и в живую, и в соц сетях. Один способ вовсе не исключает другой. 820 ( 59.29 % )
Чтобы сделать робот-пылесос своими руками, вам потребуются следующие материалы:
- «Ардуино Про Мини» — главный мозг и информационный центр всей конструкции.
- Драйвер моторов робота-пылесоса серии Л298Н.
- Понижающий преобразователь переменного тока.
- Модуль с мосфетом, посредством которого будет осуществляться контроль над темпом работы передней щетки устройства.
- 4 инфракрасных датчика, которые будут фиксировать наличие препятствий на пути робота пылесоса.
- Пара переключателей, которые будут изменять направление движение устройства при столкновении.
- 3 шарообразных колеса.

Колеса для самодельного робота-пылесоса
- Мотор, обеспечивающий вращение щетки в различных режимах.
- Мотор высокой мощности, обеспечивающий нормальное функционирование турбины.
- 4 литийионных аккумулятора, а также средство контроля над ними.
- Фанерное основание нужного размера.
- Корпус из поливинилхлорида нужного размера.
- 8 пар магнитов для крепления.
- Провода, кабели, переключатели и прочие элементы электрической сети.

Автор, специалист в сфере IT и новых технологий.
Получил высшее образование по специальности Фундаментальная информатика и информационные технологии в Московском государственном университете имени М.В. Ломоносова. После этого стал экспертом в известном интернет-издании. Спустя время, решил попробовать писать статьи самостоятельно. Ведет популярный блог на Ютубе и делится интересной информацией из мира технологий.
Источник: https://proumnyjdom.ru/texnika-dlya-doma/robot-pylesos-svoimi-rukami.html
Изготовление робота-пылесоса своими руками

Уборка вызывает ассоциации с потерей времени? Тогда следует воспользоваться ботом уборщиком, который возьмет задачи по поддержанию чистоты в доме на себя. Устройства данного типа представлены на рынке многими производителями. В конструктивном плане бот не представляет ничего сложного, поэтому при желании его можно изготовить собственноручно. Достаточно уделить внимание ключевым аспектам и окончательно решить – купить или сделать робота уборщика? Ответ всегда зависит от личных качеств каждого.
Робот, выполняющий функции пылесоса, может быть изготовлен своими руками. Процесс сборки известен очень хорошо, поэтому не вызывает никаких сложностей. Все определяется свободным временем, умением и наличием инструментов.
Стоимость собранного собственноручно робота будет значительно ниже, чем у заводской модели, что и является основным преимуществом.
Во время сборки можно узнать принцип работы и составные элементы робота, поэтому в случае его поломки восстановить работоспособность будет не сложно.
Покупка устройства интересна большинству сограждан. Подобный вариант экономит время, а также позволяет получить бота с дополнительными опциями и умениями. Но стоимость готовых моделей обычно довольно высока, поэтому позволить их себе может не каждый человек.
Как выглядит робот-пылесос?
Умельцы на практике определили целый перечень требований, которым должен отвечать самодельный робот пылесос.
Устройство может иметь различные примочки, включая наличие опции самоочистки, что позволит повысить эксплуатационные качества модели.
Если соблюсти все требования в процессе сборки, то пользователь станет обладателем механизма, полностью пригодного для уборки в офисе или квартире. Ключевые требования сведены к следующим моментам:
- Для изготовления лучше использовать цилиндрическую форму;
- Осуществление разворотов на месте будет возможно в том случае, если колеса расположить по всему диаметру нижней части;
- Для вспомогательного рулевого колеса не требуется использовать привод;
- Бот должен накапливать мусор в приемнике, имеющем легкосъемную конструкцию;
- Для безопасности модель должна комплектоваться контактным бампером, устанавливаемый на половине диаметра;
- Зарядка должна выполняться зарядным устройством безе необходимости предварительной разборки;
- Центр тяжести устройства должен приходиться на колеса или зону, находящуюся недалеко от них;
- Скорость перемещения бота — до 35 см/с.
Робот-пылесос Philips и его особенности
В процессе работы агрегата могут применяться моторы редукторного типа, оснащенные пружинным механизмом. Также при желании можно изготовить устройство с шаговым двигателем. Такой модели можно отдавать команды без редуктора.
Выполнив сборку правильно, должна получиться модель, отвечающая следующим параметрам:
- Окружность бота до 30 см при высоте в 9 см;
- Материал корпуса – поливинилхлорид;
- Бампер дополнен четырьмя датчиками, благодаря которым фиксируется расположение агрегата в помещении.
- Для фильтра используются салфетки тряпичного типа;
- Крепление крышки осуществляется с помощью магнитов;
- Установлены переключатели для реагирования при столкновениях;
- Для обивки краев используется резина, что исключает повреждение мебели и самого устройства при контакте;
- Пылесборник имеет достаточную емкость и изготовлен из поливинилхлорида;
- Турбина собирается с помощью листов пластика ПВХ.
Собираем собственного робота-пылесоса
Для изготовления бота нужно приобрести:
- Драйвер двигателя;
- Преобразователь переменного тока;
- Датчики инфракрасного типа – 4 шт;
- Ардуино Про Мини;
- Модуль с MOSFET;
- Переключатели, колеса.
Особенности изготовления робота
Пылесос, как можно заметить из информации выше, изготавливается на базе на ардуино. Именно к этому центру управления будут подключены датчики, установленные по сторонам модели. Во время стандартной работы сенсоры отправляют в центр сигнал «1», а при срабатывании датчика передается «0».
Срабатывание датчика указывает на то, что устройство столкнулось с препятствием. После этого происходит откат на заданное расстояние. Колесная база выполняет разворот, что позволяет продолжить сбор мусора.
Для таких задач потребуется воспользоваться мощными переключателями, что позволит расположить бампер на исходной позиции.
Изготовление металлоискателя Терминатор своими руками
Для производительной работы этого чуда робототехники используется двигатель, который отвечает за положение щеток в активном состоянии. Для его переключения уборщик применяет модуль MOSFET.
В процессе передвижения происходит вращение щетки с низкой скоростью, что позволяет собрать пыль и грязь в помещении и доставить ее в приемник.
Если бот приблизился к стене, то щетка начинает работать быстрее, что связано с особенностью распределения пыли по помещению.
Двигаться по дому устройству помогают аккумуляторы литий-ионного типа, установленные на платформе. Для их эффективной работы самодвижущийся робот для дома должен быть оснащен понижающим преобразователем. Устанавливать батареи и подключать необходимо последовательно.
Для изготовления основания лучше использовать фанеру, которая обладает достаточной прочностью. Движение основывается на шариковых колесах, которых должно быть 3. Щетки должны отличаться достаточной жесткостью и износостойкостью.
Схема сборки робота-пылесоса в домашних условиях
Для выполнения работ в рамках выбранного плана потребуется придерживаться простого алгоритма:
- Загрузка ПО;
- Закрепление компонентов;
- Проверка работы.
Чтобы получить бот, который сможет пылесосить дом хорошо, потребуется загрузить на ардуино необходимую программу. Выбор в пользу данного контроллера очевиден, так как устройство отличается высокой надежностью и универсальностью. Для загрузки потребуется использовать ПК, с помощью которого необходимый код будет установлен на плату пылесоса.
Следующий этап является наиболее сложным. Здесь потребуется отнестись внимательно ко всем составным элементам и обеспечить их надежное крепление. Речь идет о следующих компонентах:
- Кулере;
- Схемах;
- Колесах;
- Аккумуляторных батареях.
Все элементы монтируют на основу. Параллельно фанера выполняет задачи, возложенные на донную часть робота. Внутренняя поверхность используется для установки турбины, которую нужно предварительно собрать с помощью суперклея.
Важным элементом является контейнер, в котором хранятся отходы, собранные в помещении. Дополнительно устройство получает трубку для вывода нагнетаемого воздуха.
Устройство защищается благодаря плотной тканевой салфетке, которая отвечает за фильтрацию.
Дегидратор своими руками
Вентилятор следует соединить с сервоприводами и расположить на основании. Параллельно необходимо закрепить микросхемы и батареи, от которых устройство будет получать энергию. Подобрать колеса не сложно, поэтому диаметр определяется из личных предпочтений.
Передвижение и уборка
Готовая модель робота может двигаться по спиральной или зигзагообразной траектории. Микроконтроллер поддерживает отдельные схемы движения для каждой комнаты.
Главным моментом станет обеспечение ориентации, без которой устройство не сможет объезжать различные препятствия. Задача выполняется контактными инфракрасными датчиками. Именно они отвечают за систему обратной связи, передавая информацию о расстоянии до стены на контроллер.
Контактные датчики работают посредством ударение о препятствие, после которого происходит разворот бота.
Самоочистка робота-пылесоса
Данная функция используется во многих современных моделях. Ее особенность состоит в том, чтобы использовать определенную зарядную базу с пылесборником большего размера.
Так если стандартные устройства рассчитаны на работу с контейнеров в 0.5 литров объема, то для самоочистки потребуется база с емкостью на 2 литра.
В итоге пользователю не приходится регулярно заниматься опустошением сборника после каждого включения бота.
После заполнения основного контейнера, устройство отправится на место зарядки, где происходит процесс очистки емкости и возобновление уборки в комнате. Для некоторых данная функция может показаться излишней, так как очистить контейнер самостоятельно не сложно. Но для тех, кто включает устройство при уходе из квартиры, а также для аллергиков подобная функция будет кстати.
Источник: https://techsad.com/aksessuary/izgotovlenie-robota-pylesosa-svoimi-rukami/
